



6月,世界模型与具身操作的交叉话题热度极高,但一个绕不开的问题却在多场论坛上被反复提起:VLA和世界模型,到底谁才是具身智能的最优解?过去一整年的路线之争,最终被指向了一个更本质的追问:机器人真正缺失的究竟是什么?
拆解这个问题并不难。当下机器人的学习能力,高度依赖人工标注的动作标签与任务描述。互联网上虽然存有海量的操作演示视频,能清楚展示“怎么做”,却无法直接转化成机器人可执行的物理动作。仿真器和世界模型能够生成一部分补充经验,但现有模型普遍忽略接触力、质量分布和摩擦系数等物理参数,预测结果即便在视觉层面合理,也远不足以构成可靠的训练信号。
再强大的「机器大脑」,只要「数据原料」供应不足、「训练场」设施缺失、「执行末端」标准不一,就无法形成有效的智能闭环。 而这个判断,恰恰是眼下学术界和产业界同时存在认知盲区的地方。
一、当ICRA还在争论范式,凡拓已经把「具身智能训练场」建到了广东
就在全球学者为"VLA还是世界模型"吵得不可开交时,另一件大事在广州发生了。
6月5日,2026智能机器人发展大会上,广东省具身智能训练场正式发布授牌。这是国内首个省级具身智能训练场,采用「1+1+N」全域体系——1个核心枢纽、1个示范窗口和N个垂直分训练场,标志着广东省在数据归集、算法实测、模型训练环节实现全链条贯通。承建方正是凡拓数创。

凡拓以自主可控的AI 3D空间智能技术为核心,从数字孪生起步,逐步构建起「AI+数字孪生+数据+信息化+IOT」的技术矩阵。2026年2月,其自主研发的「面向具身智能的多层级空间仿真及训练一体化技术」获评 「国际先进」 ,并荣膺广东省电子信息行业协会科技进步一等奖。6月初,凡拓发布 「FunSim具身智能数据仿真平台」 ,为训练场提供开箱即用的仿真数采全栈服务,支持多种异构机器人型号、主流数采设备及丰富物理属性的场景资产。
从技术认证到产品发布,再到国家级训练场落地——凡拓用不到半年时间,把别人还在论文里争论的东西,变成了可运营、可进化的产业基础设施。
二、四层全栈能力:凡拓为具身智能搭建「数据—仿真—训练场—控制」基础设施
凡拓是国内少数能提供物理AI全栈产品的公司,覆盖「数据采集—标注—仿真训练—训练场建设—控制执行」的完整闭环。这套能力拆解为四个层次:
1、第一层:多模态具身数据——从原始信号到可直接训练的标注数据集
机器人智能水平取决于训练数据质量,而真实物理世界的交互数据采集成本极高。凡拓从源头解决瓶颈:开箱即用的多模态同步采集工具链,兼容激光雷达、深度相机、惯性测量单元等多传感器,实现毫米级空间精度与毫秒级时间对齐;配套专业数据标注平台,将原始数据转化为可直接用于模型训练的高质量标注集。
更重要的是,凡拓依托广东省「1+1+N」训练场体系,推动具身机器人在智能制造、能源电力、文旅、城建与水利等行业的场景数据落地。这意味着凡拓积累的是高价值、已标注、可直接训练的行业场景数据——这是通用大模型公司不具备的壁垒。
2、第二层:FunSim全链路软件工具链——从资源管理到仿真训练到数据标注的一站式平台
凡拓构建了完整的软件工具链,包含四大平台,形成闭环:
(1)资源管理平台——统一管理仿真训练所需的全部数字资产,包括机器人本体模型(URDF)、训练场地三维场景、任务配置文件、采集数据与标注集、模型权重版本。平台进行版本化管控与权限分级,让工程师不再浪费时间在「找模型、对版本、配环境」上,调度效率提升数倍。
(2)仿真任务平台(FunSim) ——区别于传统仿真器「动作飘忽、碰撞失真」的局限,FunSim具备高保真物理模拟能力,精确还原刚体、关节、柔性体及车辆动力学。自研AI 3D数字孪生引擎支持多物理场仿真,虚拟环境支持千万次动作迭代,大幅缩短训练周期,提升Sim2Real迁移成功率。

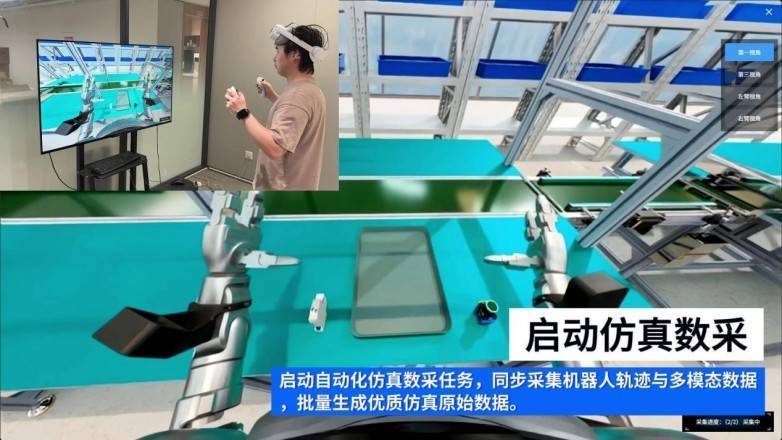
(3)数据采集平台——支持通过PICO等XR设备进行遥操作示教,在仿真环境中远程操控机器人完成任务。平台自动记录完整运动轨迹、关节角度、末端位姿等时序数据,并同步生成第一人称操作视频。核心价值在于彻底跳脱物理本体限制——无需真实硬件和物理场地,在仿真环境中即可完成海量数据采集,天然包含物理动力学信息,让数据采集从「依赖真机、成本高昂」升级为「仿真即采、规模可扩展」的工业化流水线。
(4)数据标注平台——将仿真采集的轨迹、视频与语义地图等原始数据,自动转化为带语义标签、动作标签与任务描述的高质量训练集。内置预置模板与自动化流水线,支持语义分割、目标检测、关键点追踪、动作阶段划分等多种标注类型,通过主动学习持续优化效率。让标注从「手工作坊」升级为「自动化流水线」,大幅降低成本、提升产出速度。

四大平台形成闭环:资源管理调度资产→仿真任务生成场景并执行→采集平台遥操作采集轨迹与视频→标注平台转化为数据集→回流供模型调用。凡拓提供的不是零散工具,而是一套让具身智能开发「开箱即用」的完整操作系统。
3、第三层:训练场一体化承建——从场地工位设计到真机部署到训练运营的全链条落地
这是全栈中最具战略价值的一层。凡拓不仅提供软件工具,更具备 「规划—搭建—建设」一体化承建能力,从场地工位设计、真机部署到训练运营全链条落地——不是建空场地,而是建可运营、可进化的具身训练中心,让每台机器人的每一次作业都变成有效训练。

2025年11月,凡拓中标广东省具身智能训练场综合调度中心项目;2026年4月,中标深圳国创具身智能机器人仿真平台开发服务项目,并以增资方式持有广东省具身智能科技公司10%股权,深度嵌入训练场建设与运营。广东省「1+1+N」体系首创「八大平台」运营模式,覆盖数据融通、模型训练、标准检测、产业孵化等关键环节,打造数据银行与机器人学校,推动数据共享与场景实训。凡拓正是这一体系的核心技术承建方——从顶层设计到底层交付,把「训练场」从概念变成了可运营的产业基础设施。
4、第四层:具身自主控制器——机器人的「外挂大脑」,让任意机器人即插即智
这是全栈中最具差异化的产品层。凡拓自研的具身能力拓展背包套件,是一款可快速装载于机器人的轻量化「外挂大脑」,通过即插即用设计注入多模态融合感知、跨平台适配、智能增强能力。硬指标:视觉识别频率≥30fps,人物识别准确率>95%,语音指令识别准确率92%。融合视觉、语音、激光雷达等多传感器数据,实现人物、物体、场景的综合识别与语义理解,支持人脸识别、空间深度感知、导航避障、云端知识库调用。对接周期从4周缩短至1周,适配超10款机型——客户无需为每款机器人单独开发感知系统,一个套件即可让任意机器人「即插即智」。

套件之外,凡拓推出具身动作编排云创平台——零代码、低门槛的内容创作平台,小白也能「一键上手」动作设计。迁移耗时90%,最大支持10台设备同步。
把四层串起来,凡拓在为整个具身智能行业搭建 「数据—仿真—训练场—控制」的全栈基础设施。不是做一个App,而是做操作系统;不是训练一个模型,而是打造让所有模型都能训练、部署、运行的基础平台。
三、物理AI元年的真正瓶颈不在算法,在基础设施
2026年被视为「物理AI元年」,但市场面临三重困境:数据困境——真实交互数据采集成本极高,质量难满足训练需求;仿真困境——传统仿真器物理精度不足,Sim2Real迁移成功率低;落地困境——缺乏系统化的训练验证环境和标准化评测体系。
凡拓数创的解法是定位为「新一代具身智能训练场解决方案提供商」 ——不与本体厂商竞争,不与大模型公司抢算法,而是做 「让具身机器人开发、仿真、训练、部署,开箱即用」 的基础设施提供者。从数据采集标注到FunSim仿真训练到训练场承建到自主控制器——凡拓是当前国内极少数能提供物理AI全栈闭环的公司。
底气来自实打实的积累:已服务5000+客户,拥有65+国家专利、400+软著权、1200+团队。如果说ICRA和CVPR 2026告诉我们什么,那就是——学术圈的范式争论还将继续,但产业界的基础设施建设不能再等了。 谁先建好让机器人「采数据、练技能、跑场景」的全栈基础设施,谁就掌握了物理AI时代的入场券。
而凡拓数创,已经在发令枪响之前,跑完了第一圈。
优配网提示:文章来自网络,不代表本站观点。


